
在享受摄影艺术乐趣的同时,沉浸于3D空间的奇妙体验成为现实。激发创客热情的一种绝佳方式,是在单一项目中尽可能多地整合树莓派设备。Reddit用户Low-Junket9298成功开发了一款名为“动态立体图”的创新相机,巧妙运用五台树莓派协同工作,赋予相机炫酷而逼真的3D视觉效果。

若您对“动态立体图”这一专业术语尚不熟悉,我们在此提供简明解释。这种摄影技术本质是通过多台相机同步捕捉图像,随后将这些画面拼接成GIF或视频格式,通过来回晃动效果在三维空间中生动展示立体场景。市场上已有现成解决方案,例如Nishika相机,但Low-Junket9298突破性地采用人工智能插值技术,从零构建专属相机,能生成超级流畅的动态立体图作品。实际效果示例可在其Fiewfly网站上直观浏览。
Nishika相机参考链接: https://stereoscopy.blog/2019/10/06/nishika-3-d-n8000-camera-review/
Fiewfly网站链接: https://fiewfly.com/
Low-Junket9298的Fiewfly相机采用独特设计,每个树莓派Zero 2 W搭配专用相机模块独立捕捉图像,而非将多台相机连接到单一树莓派上。这些分散采集的图像由树莓派处理器模块4进行智能拼接(我们好奇处理器模块5是否适用),并利用人工智能算法填补画面空白,确保动态立体图的过渡无比流畅。



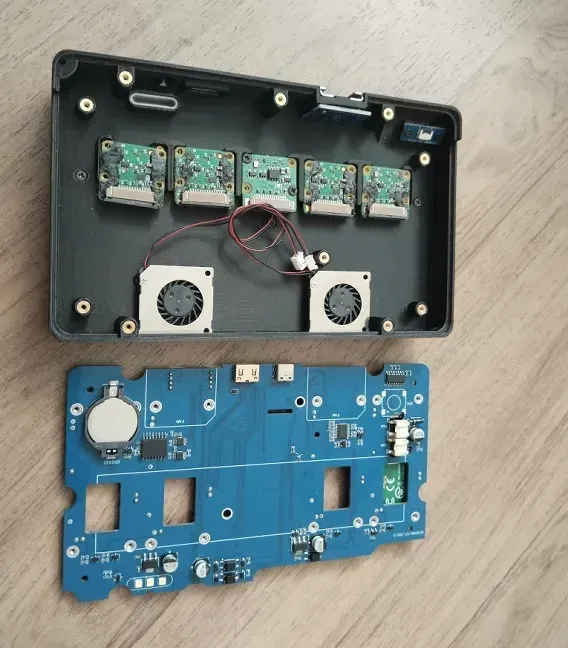
Low-Junket9298决定不将该项目开源,但计划可能出售重现所需的核心组件,例如容纳树莓派和相机模块的定制印刷电路板。现成部件如树莓派Zero 2 W、树莓派CM4、液晶显示屏以及树莓派相机模块V3广角镜头均可单独采购。整个系统由两个5000mAh 955565电源高效供电,所有硬件精密集成在一个3D打印定制外壳内。

由于该项目未开源,我们无法获取源代码详细细节。不过,Low-Junket9298在Reddit分享的系列帖子中阐述了工作原理。采用独立树莓派进行图像捕捉,能显著减少影响最终效果的延迟问题,这种延迟是人工智能插值技术难以完全修复的。多台树莓派构成高精度系统,确保示例照片中的动态立体图展现出非凡的流畅度。
若您希望深入了解这款树莓派相机,可查阅Reddit相关帖子获取更多技术细节;同时,访问官方Fiewfly网站浏览内部结构图片,全面探索其强大功能。